
Brad Templeton Home
Robocars
Main Page
Brad Ideas
(My Blog)
Robocar Blog
My Forbes Articles
(Book from 2008)
The Case
Sidebars: Charging
The Valley of Danger: Medium Speed
In computer graphics, there is a concept known as the "uncanny valley." It was named when people noticed that the more realistic they made computer animated human characters, the more they bothered people. It turns out that until you do it almost identical to the real thing, human minds are trained to find something that is slightly less than human as creepy. Woody in "Toy Story" looks like a doll and is fun. The conductor in "Polar Express" tries to be a human, but looks disturbing.
If you plot how good the animation is against how much people like it, there is a valley. For a while, better animation means a better reaction, but then it moves down again into the valley, and then goes back up as you approach undetectable.
There is a similar valley when it comes to robocars, and it's in the chart of safety vs. speed. If you make a robocar slow enough, you can make it very safe. In fact, you've probably seen delivery robots wandering around hospitals at one MPH, mingling safely with patients. People have deployed unmanned robocars among pedestrians at up to about 12MPH, because at that speed they can stop quickly enough if something suddenly gets in their way, and if they somehow manage to still hit something, they are not able to do much harm.
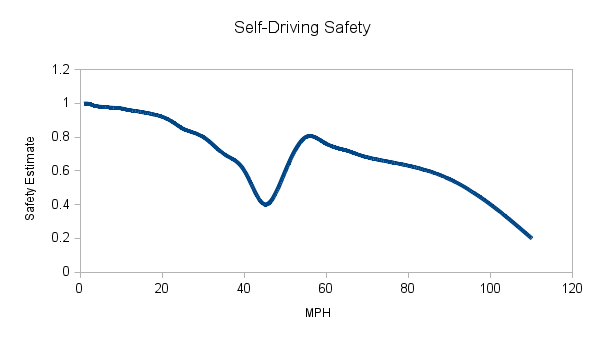 |
| A very rough plot of safety vs. speed. The scale doesn't mean anything |
As speed increases, safety becomes harder, both because stopping distances are longer and because sensor range remains the same. As things move into your field of perception, you have less and less time to react to them.
The risk grows for a while, and is greatest on the highest-speed urban streets which mix pedestrians, cyclists and other elements with higher speed.
Urban roads tend to get up to around 40 to 45MPH, but then they start getting simpler. By the time they get to 50MPH they tend to be mini-highways. They are not full freeways but tend to have far fewer pedestrians and cyclists, if any. They have fewer intersections, and often no driveways.
This is still dangerous because a lot can happen that's unexpected, and you're going fast, but it's actually a bit less risky than an ordinary road.
The Freeway
Then the big transition happens, onto the limited-access highway. These roads are faster, 55MPH or more, but they explicitly ban everything but high speed motorized vehicles. Pedestrians who dare to venture onto them -- often due to vehicle breakdowns -- are sadly often killed by human motorists who don't have the reaction time to handle such situations at highway speeds. These roads are also usually divided and have shoulders and guardrails. You can't easily get into a head-on collision with oncoming traffic -- you don't even have to worry about it -- and there's almost always a place to pull off if you have a problem.
It's possible that going slowly (55MPH) on a freeway could be an easier problem to solve than going 15MPH on a busy urban street. As such the risk drops as the complexity of driving gets less.
You are still going very fast though. So fast, in fact, that you are overdriving the range of the typical 905mm LIDAR sensor used by most robocars. These sensors can see well to about 70m, and see bigger things like cars out to 100m; sometimes a bit more. At 55MPH you can stop on dry pavement in about 50m, so there's some margin, but you also need time to perceive new objects that come into your perception zone, time to understand them and make decisions. Computers are fast, but the problem is that objects at the extreme ranges of sensors are not well defined. Usually they are not understood until there have been a few sensor sweeps. As such you need time, and you need to get closer, and you're going just under 30 metres per second.
Get up to 80MPH and your hard stopping distance is almost 100m. A sudden obstacle will not allow you time to brake. It may allow you time to swerve (if you can) or deal with the problem in other ways. Humans also have trouble at this range, especially since they take about 3/4 of a second to see and react to things. A human will not be able to brake for a sudden obstacle that appears 150m ahead.
Fortunately, a few things change the equation. Radar, for example, can see much farther than 100m, and it does it even in fog. Radar is very good at seeing cars or anything else that moves. It has a problem with stationary objects, like stalled cars, not because it doesn't reflect off them, but rather because it's hard to tell them from fixed objects like signs, fenceposts, bridges and even bushes.
This means you are safe if you are following another car, a car that has longer range perception than you have -- for example a human driven car. Tracking a car you are following is quite reliable with radar and LIDAR. Other cars are also moving forward with you, and so you can brake along with them even if you're not that far off their tail if your reaction times are fast.
But sometimes you have to be the leader.
Longer-range LIDAR
To help with that, there is another type of LIDAR which operates in the 1500nm (1.5 micron) deeper-infrared band. LIDAR here can be much brighter and still be safe for the eyes, because the human lens does not focus light at this deep wavelength. Because the light can be brighter, if can go further and still stand out against the sunlit background. 1.5 micron LIDARs can see out 200 to 300 meters -- which is more than enough for high speed driving.
Such LIDAR is less common because silicon photosensors don't react to light at 1.5 microns. This light is almost at the level of being heat radiation. However, there are other, less common photosensors that do react. (Get to the deeper infrared, such as that seen by thermal cameras at 8 microns, and no purely electronic sensor reacts. Those cameras use small mechanical elements that bend from the heat radiation of the longwave light.)
It's worth noting that Google recently revealed that they are developing a long-range LIDAR in their own labs which will more than double the range of the existing 905nm LIDARs, and that should serve well for giving the vehicle the sensor range it needs.
Humans have a much longer range because they work from reflected light and the human eye. A person can literally see things coming a mile away -- if the visibility is good and it's daytime. At night, people routinely drive faster than their headlights can safely allow them to do -- and accidents often result, particularly with animals. If computer vision gets to the point that it can reliably identify objects far in the distance, robocars could also use it to get the range they need, both in the daytime, and even in the night where more targeted illumination can be possible for longer range.
High Resolution Radar
Another promising sensor area is high resolution radar. Radar sees quite far, but is very low resolution. In fact, it's sometimes a challenge for a radar to tell what lane a detected obstacle is in. Higher resolution radar would solve this. Research radars exist which can take a 3-D picture akin to what a LIDAR does. To make this happen, you need lots and lots of bandwidth, and currently the FCC and other agencies don't allow that much bandwidth to be used. There are techniques known as Ultra-wideband (UWB) which use immense amounts of bandwidth but spread out in a way to not interfere with other users. It is debatable if they can be allowed.
Radar's one downfall is that it is more likely that competing radars on the same road could interfere with one another. LIDARs generally don't interfere, as they rely on super-short (sub-nanosecond) pulses of light, looked for in a microsecond window. To interfere, another LIDAR would need to send out a pulse to the same spot in the same microsecond.
Vision
Vision has long range -- if it can be made to work reliably. Someday that will happen and that will be useful, but for now lasers win the trade-off in Lasers vs. Cameras.
Bridging the Valley
So long as the valley is present, it becomes probable that there will be a time when it's possible to make a car sufficiently safe on low speed roads, and on highways, but not on the higher speed urban roads. What happens then?
Vendors may decide to make cars that go after just one of those targets. For example, you might see cars meant only for controlled low-speed areas, like downtown pedestrian malls, campuses or housing subdivisions. You might also see cars that are just for the highway -- a human drives them onto the highway, gets them in the lane, and like a cruise control, engages the system only then. The system will warn of the need to disengage well before the end of the highway or the planned off-ramp.
A car can do both of course -- drive you in the slow speeds and on the highway. You would almost always have to manually drive the paths between, since often the arterial roads that get onto highways are of the 35-45mph type, but not always.
A car that can only go at low speeds can have high value if it's able to go unmanned at low speeds, so that it can deliver itself and refuel itself, so long as it sticks to low speed roads. Because a car that is running unmanned is often not in any particular hurry, it's OK if it sticks to low speeds and takes a rather strange route on back-streets to get from A to B.
This car would probably not go on the highway unmanned. Instead it might pick up a passenger, and expect them to drive the higher-risk streets, including getting to the highway. Once there, the vehicle could take over and let the occupant do other things.
Swerving
The big issue with the valley is that something might appear in your way such that the laws of physics don't let you brake in time to avoid hitting it, given a reasonable perception delay -- or sometimes even assuming instant perception. Somebody darting out from behind a parked truck is an example -- no way to expect it, no way to brake in time.
Braking is still good, because if you are going to hit something, the slower the impact speed the better. Another option is to swerve.
Swerving is problematic. For one thing it might not work. The obstacle might still be moving and still be hit. More troublesome is your surprise move into somewhere you weren't planning to go -- particularly if it means temporarily entering the oncoming lane of traffic.
Of course, if you see something in the oncoming lane, you dare not enter it, in spite of what philosophical debates about the trolley problem might suggest. If so, you'll hit something by your overt actions when you don't have the right-of-way, and the law will punish that much harder than a crash where you had that right-of-way. Perhaps the law is wrong here but that's how it is today. In addition, hitting oncoming traffic is far more dangerous than just about anything.
This is strong enough that swerving is an unlikely course even when you are "pretty sure" the other lane is clear, and that you can get back to your lane when done. Pretty sure isn't going to be good enough, you will need a high degree of certainty. You might be in a border case where something is in the other lane, but you can probably get back to your lane in time. But by definition you're in a situation with something in front of you, and it might be blocking your view of something else in your own lane.
It's a lesser problem, but still a problem, if you are swerving into a lane going in your direction. There you have to be sure nobody is about to pass you in that lane. That's not too hard -- if you have sensors looking backwards that are up to the task. Since most driving does not demand sudden swerves, a lot of the sensor budget will go where it's most needed -- looking ahead.
Swerving also has its own risks. Tires can slip when turning sharply. General good driving practice involves braking first, then swerving; braking and turning can cause loss of control.
This is not to say that it's impossible to design a system to swerve safety when it can do so. Rather, it simply means that this is hard, and thus there is a valley of danger. At slow speeds you can just stop. On highways you can count on sudden surprises being extremely rare (and also illegal.) The valley presents a risk that needs to be overcome.